Vamos a distinguir tres grandes grupos de mecanismos:
1.- MECANISMOS TRANSMISORES DE FUERZAS
1.- MECANISMOS TRANSMISORES DE FUERZAS
Cambian la dirección y/o la intensidad de las
fuerzas.
PALANCAS:
- Los componentes de una palanca son una barra rígida, el punto de apoyo (o fulcro), la potencia o lugar donde se aplica la fuerza y la resistencia o el peso que se quiere vencer.
- Dependiendo de la posición del punto de apoyo (PA), la resistencia (R) y la fuerza (F), se distinguen tres tipos de palancas:
- Primer género: el punto de apoyo está en el centro (p.ej.balancín)
- Segundo género: la resistencia está en el centro (p.ej. carretilla)
- Tercer género: la potencia está en el centro (p. ej. caña de pescar)

- Si la fuerza está más alejada que la resistencia del punto de apoyo, el esfuerzo para levantar el peso será menor (hay ganancia mecánica), aunque se recorre más espacio. Se conoce como ley de la palanca: F·dF=R·dR.
Ejercicio resuelto: Con
una palanca de 8 metros, se coloca el fulcro a 3 metros de un peso de
100 kg. ¿Qué fuerza habrá que aplicar para
levantarlo?
Si
la palanca es de 8 metros dR=3
y dF=5;
- Está formada por una rueda que gira sobre un eje, con una acanaladura para pasar una cuerda.
- Con una polea simple, la fuerza es igual a la resistencia, y el tramo de cuerda que se tira es igual al espacio que se levanta el peso. F= R. La única ventaja es que se cambia el sentido de la fuerza.
- Con poleas móviles y polipastos, además de cambiar el sentido de la fuerza, se obtiene ganancia mecánica. Si hay una polea móvil, la fuerza será la mitad de la resistencia. F=R/2.

En un polipasto, la fuerza que tenemos que ejercer para levantar un peso es igual al peso dividido por dos veces el número de poleas móviles.

2.- MECANISMOS TRANSMISORES DE MOVIMIENTOS
Pueden
modificar la velocidad del movimiento. Siempre hay un operador que es
motor o conductor, y que trasmite el movimiento a otro, que es el
conducido; a veces se usa un elemento intermedio: la correa o cadena.
- Ruedas: objeto rígido circular que gira alrededor de un eje. Cuando se ponen en contacto, una conduce el movimiento a la otra, pero cambiando el sentido de giro.
- Poleas de transmisión: dos ruedas enlazadas por una correa de transmisión, de forma que una, la motora o conductora, transmite el movimiento a la otra, la conducida.
- El sentido de giro es el mismo en las dos.

- Puede ser reductora (la velocidad del elemento conducido es menor que la del conductor), multiplicadora (la velocidad es mayor) o de transmisión lineal. Al cociente entre la velocidad de salida y la de entrada se llama relación de transmisión.

- Engranajes: cuando se utilizan ruedas dentadas.

Pueden transmitir el movimiento directamente (sentido de giro contrario en cada uno) o a través de una cadena, y también hay que ver la relación de transmisión, aunque aquí se puede ver estudiando el cociente entre el número de dientes de la rueda de entrada y el número de dientes de la de salida.



- Tornillos sin fin. Es un cilindro con rosca que se usa como operador conductor, conectado a una rueda dentada.

3.- MECANISMOS TRANSFORMADORES DE MOVIMIENTOS
Modifican
el tipo de movimiento: lineal, circular, vaivén, etc.
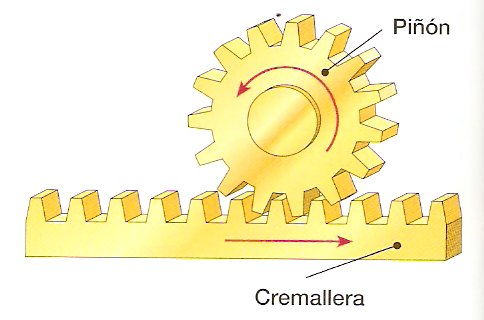
- Piñón/cremallera: Una barra recta dentada y deslizante, que encaja con un piñón o rueda dentada. Es un mecanismo reversible que permite transformar el movimiento circular en rectilíneo y viceversa.

- Leva. Es una rueda que no tiene forma circular y que provoca con cada giro un desplazamiento a otro operador, llamado seguidor de leva. No es reversible. La excentrica es una rueda que gira sobre un eje que no está en su centro geométrico. De forma similar a la leva, en cada giro produce un desplazamiento de otro operador

- Biela. Un operador que enlaza una rueda o manivela, con una pieza que encajada en una guía realiza un movimiento rectilíneo de vaivén. Así transforma un movimiento circular en uno de vaivén o viceversa (reversible).







PARA TERMINAR, AQUÍ TENÉIS UN VÍDEO DE UNA MÁQUINA MUSICAL DE CANICAS, QUE UTILIZA MUCHOS MECANISMOS...
¿CUÁNTOS PUEDES IDENTIFICAR?
- El movimiento en las máquinas (Temas clave)
- Repaso con animaciones, ejercicios, retos...
- Definiciones de mecanismos y operadores
No hay comentarios:
Publicar un comentario